Photographs by Bob O'Connor

MIT’s Mechatronics Research Laboratory is home to robotic arms, cell-phone-recycling robots, 3-D scanners, and robot fish. But the laboratory, located in the basement of Building 1, also houses a cemetery—a box on the desk that until recently was occupied by mechanical engineer You Wu, SM ’14, PhD ’18.
The box, which Wu calls “the graveyard of the past,” holds former versions of his robot, Daisy—a four-inch-long shuttlecock-shaped bot capable of navigating pipes to detect small leaks in water grids. The robots were laid to rest after failing to perform as intended—but the effort was not for naught, because Wu learned something from each one. The first three shut off when submerged because their rubber bodies leaked. The next few didn’t detect leaks well enough. Success arrived with the robot’s 11th iteration. The current version is the 17th.
Growing up in Changzhou, China, Wu was well aware of the importance of conserving water. The city’s burgeoning population stressed its electrical and water grids so badly that authorities planned deliberate outages to ration resources. The company employing Wu’s parents, both engineers, had to shift its weekend to Sunday and Monday to work around them. So upon arriving at MIT in 2012 after studying mechanical engineering at Purdue University, where he focused on wearable devices such as a touch-and-feel glove for virtual reality and video games, Wu joined the Mechatronics Research Lab of professor Kamal Youcef-Toumi, SM ’81, ScD ’85, and began working on the lab’s leak detection project. Dimitrios Chatzigeorgiou, PhD ’15, had developed a device to identify gas leaks, and Wu was charged with adapting it for water pipes.
Wu was drawn to the idea of helping to tackle a major problem: the average water grid loses about a fifth of its supply to leaks. The World Bank estimates that each year, that adds up to more than 32 billion cubic meters of treated water leaked from urban water supply systems around the world. In the US, utilities struggle to cope with crumbling infrastructure and aging pipes. In a 2012 survey of US water suppliers in the Great Lakes region, 55 respondents estimated that the 63,000 miles of pipes they collectively managed leaked 66.5 billion gallons of water annually—enough to supply 1.9 million Americans with clean water for a year. Beyond wasting water, big leaks can cause flooding and sinkholes, which not only threaten public safety but can lead to infrastructure damage that costs millions of dollars to repair.
“Current water-leak detection technology can only tell you about leaks that grow to a certain size—only leaks once they are big,” Wu says. Acoustic devices that “listen” for sounds or vibrations associated with a leak can pick up changes in water flow inch by inch across a pipe, but they only work when leaks are large enough to make their vibrations stand out from background noise (like the sound of cars on a nearby road). Such leaks, Wu says, often flow at 10 gallons a minute—about twice as fast as the rate of water escaping the average shower head.
“That’s not good enough,” Wu says. “Leaks grow from tiny to big. We want to sense them before they grow into big ones, so you can save water and also protect infrastructure.”

To detect small leaks, the Mechatronics Research Lab focused on delivering robots into pipes, to sense leaks from within. When Wu joined, the lab was working on a self-propelled robot with a sensing drum that proved it was possible to detect millimeter-scale gas leaks. But when Wu tested its ability to detect water leaks, he found that water turbulence prevented it from distinguishing between leaks and other ambient noise. So when he became project lead in 2015, he began to think about other ways to approach leak detection.
While hosting a summer party in 2016, Wu accidentally stepped on the skirt of his girlfriend’s long dress. It suddenly occurred to him that it would be nearly impossible to step on or tug at a skirt without the wearer realizing it. “You step on someone’s skirt, and they know,” he says. That “aha!” moment gave him the idea to replace the robot’s leak-detecting sensing drum with a sensing skirt. With that concept as a starting point, he tapped into his soft-robotics expertise and completely redesigned the robot.
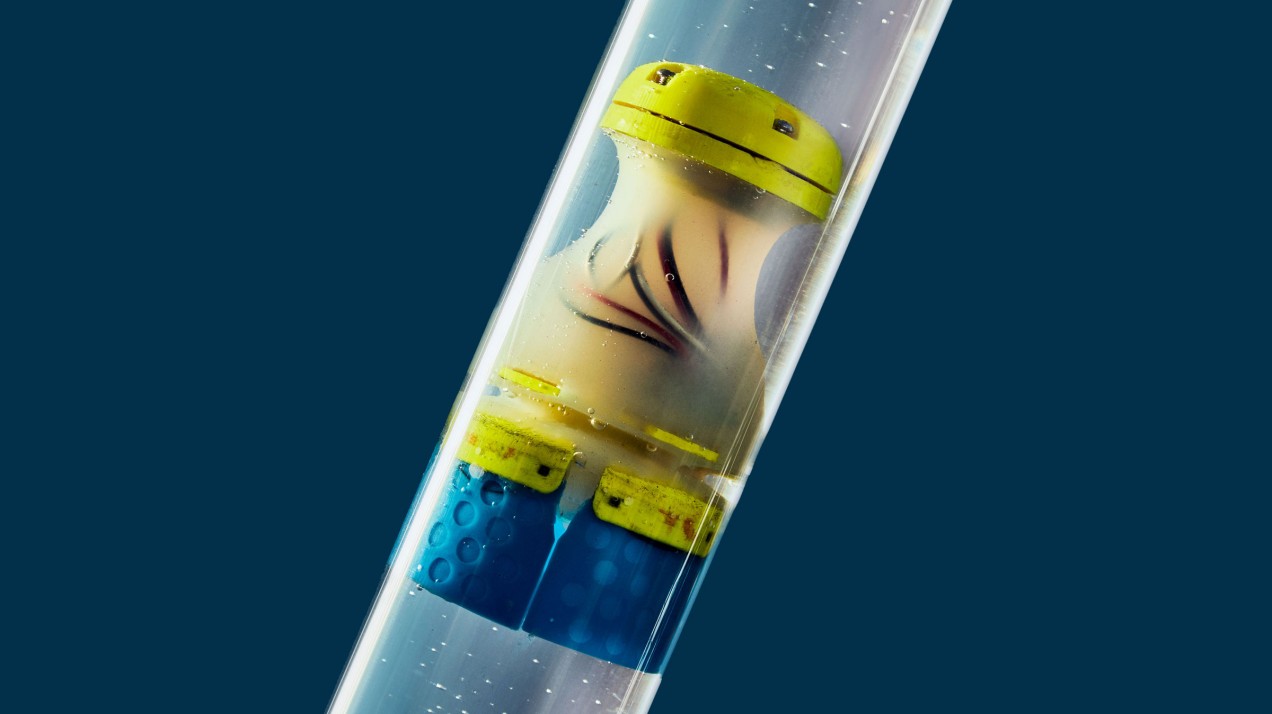
The result was Daisy, the skirt-wearing, squishy, colorful leak detector. Made with 3-D-printed and hand-molded rubbers and plastics, each Daisy bot is assembled by hand in the lab. The little robot has a hard yellow head, a semi-transparent flexible body containing electronics, and a bright blue sensor-filled skirt. Each part plays an important role, but it’s the skirt that performs the hardest job: detecting the leaks.
Inserted into water grids at accessible junctions, like fire hydrants, Daisy is designed to inspect pipes without disrupting service. As water flows through, the bot is carried along, dragging its skirt along the inner surface of the pipe. If there’s a leak, the accompanying suction pressure tugs at the skirt, whose sensors record the force, pinpointing the leak’s location within one foot. It also detects the shape of the leak and its rate—even if it’s as slow as a gallon per minute. Once Daisy journeys through a grid, all the data it collects can be uploaded to a laptop and viewed in map format. The ability to generate an up-to-date map of the grid’s pipes is in itself useful, since construction-related changes often aren’t mapped. And when Daisy does find leaks, being able to zero in on them while they’re small makes it possible to fix them with minimal disruption, limiting repair costs as well as water loss.
In August 2017, Wu founded a startup to commercialize Daisy as a leak-searching tool for water pipes. In June 2018, he dissolved that company (whose name, Pipeguard Robotics, was also used by a pipe insulation company) and incorporated WatchTower Robotics to continue developing Daisy, which he now markets as a product called Lighthouse. Since graduating in June, he has worked full time on the company; he spent the summer in Denver at the Techstars Technology Accelerator. By now well versed in explaining Daisy’s technology and its potential impact, he has won many sustainability competitions and design awards, including the MIT Water Innovation Prize, the Boston HUBWeek Demo Day Pitch Grand Prize, 2018 US James Dyson Award, and the Future Innovator of the Year award at the 2018 Environmental Media Association Impact Summit in Los Angeles. He was also chosen as an MIT Solve Fellow and was named as one of Forbes magazine’s “30 Under 30 in Manufacturing and Industry” for 2018. (“I didn’t think I could make it,” he says of the Forbes list.)

While the 11th version of Daisy worked, Wu is still tweaking the design. For each iteration, he solders together the robot’s internal electronics, prepares rubber molds, and codes the microchips that transfer data from robot to computer screen. For his early designs, he poured blue rubber into Daisy’s skirt mold and embedded various configurations of conductive black rubber pieces into the skirt before the blue rubber cured. Those pieces of black rubber serve as sensors: when a change in water flow stretches or compresses them, their resistance changes, and Daisy records the change in the electrical current flowing through them.
Then he got the idea to stitch his sensors onto fabric in a specific pattern and then submerge that fabric into the liquid blue rubber, curing them together in the skirt mold. When it solidified, the rubber would encase the fabric and sensing material, making the resulting sensing skirt waterproof, flexible, and resistant to tearing. That brainstorm—which led to Daisy version number 14—sent Wu to YouTube to teach himself how to use a sewing machine. Incorporating fabric into the sensor-laden skirt causes it to move only in certain directions in response to specific kinds of leaks, allowing Daisy to provide more accurate information about the leaks it encounters. Other tweaks have improved the bot’s user interface, making it easier for users to read and interpret detection data. And in the process of scaling up Daisy into the commercial Lighthouse product, Wu has been developing a range of sizes from 2 to 16 inches to accommodate different pipe diameters.
Mark Gwynne, IT director of Severn Trent Water, a water company based in the United Kingdom, helped coordinate field tests of Wu’s robot in the UK in January 2018. “We can definitely see a place for it in terms of being part of the tool kit for all our water engineers,” Gwynne says. “The technology is totally groundbreaking.”
But when things don’t go well in a test, that’s useful information too. During field tests in Virginia last January, Wu noticed that his robot would stop collecting data about six minutes into its journey through the water pipe. He suspected the near-freezing waters shut down the robot’s electronics, but in the field he couldn’t determine if his hunch was correct. So that evening, Wu towered over his hotel bathtub, which he filled with ice, water, and his robots. Six minutes in, he saw the robots turn off—and confirmed the culprit. Back in the lab, Wu focused on further insulating the bots so that they could withstand cold temperatures. Since then, none of his robots have shut down from cold.
Wu hopes to inspire others to use their life experiences to inform their robot designs. By approaching problems from a different angle, “you can come up with ideas that people have not thought of before and could turn out to work really well,” he says. “Not just well-trained engineers can make robots. Everyone can make robots.”