Intelligent Machines
Tiny Robotic Hand
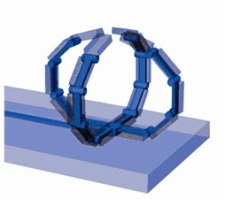
Four-fingered gripper to aid surgery.
In a UCLA School of Engineering lab, a mechanical hand only one millimeter wide plucks a single fish egg from an underwater clutch. “It is the world’s smallest robotic hand and could be used to perform microsurgery,” says Chang-Jin Kim, who led its development. Unlike other tiny machines of its kind, the device (depicted at left) is flexible yet strong and is controlled by air, not electricity. The microhand has four “fingers” made of several pieces of silicon each, with polymer balloons serving as “muscles” at the joints. Each balloon is connected to narrow channels through which air is pumped. When a balloon is inflated or deflated, the angle between joints changes, making a finger contract or relax. The device is one to two years from practical use; Kim is working with a company to develop a new version, with optical fibers on the palm–a microhand with an eye–that would enable a doctor to see, allowing better control during an operation.